
Танзимгари филтр Филтри ҳавоӣ EPV2 Силаменти Pniumumbric Pnizervalv

Тафсил
Фишори таъҷилӣ: Фишори муқаррарӣ + 0.1mpa
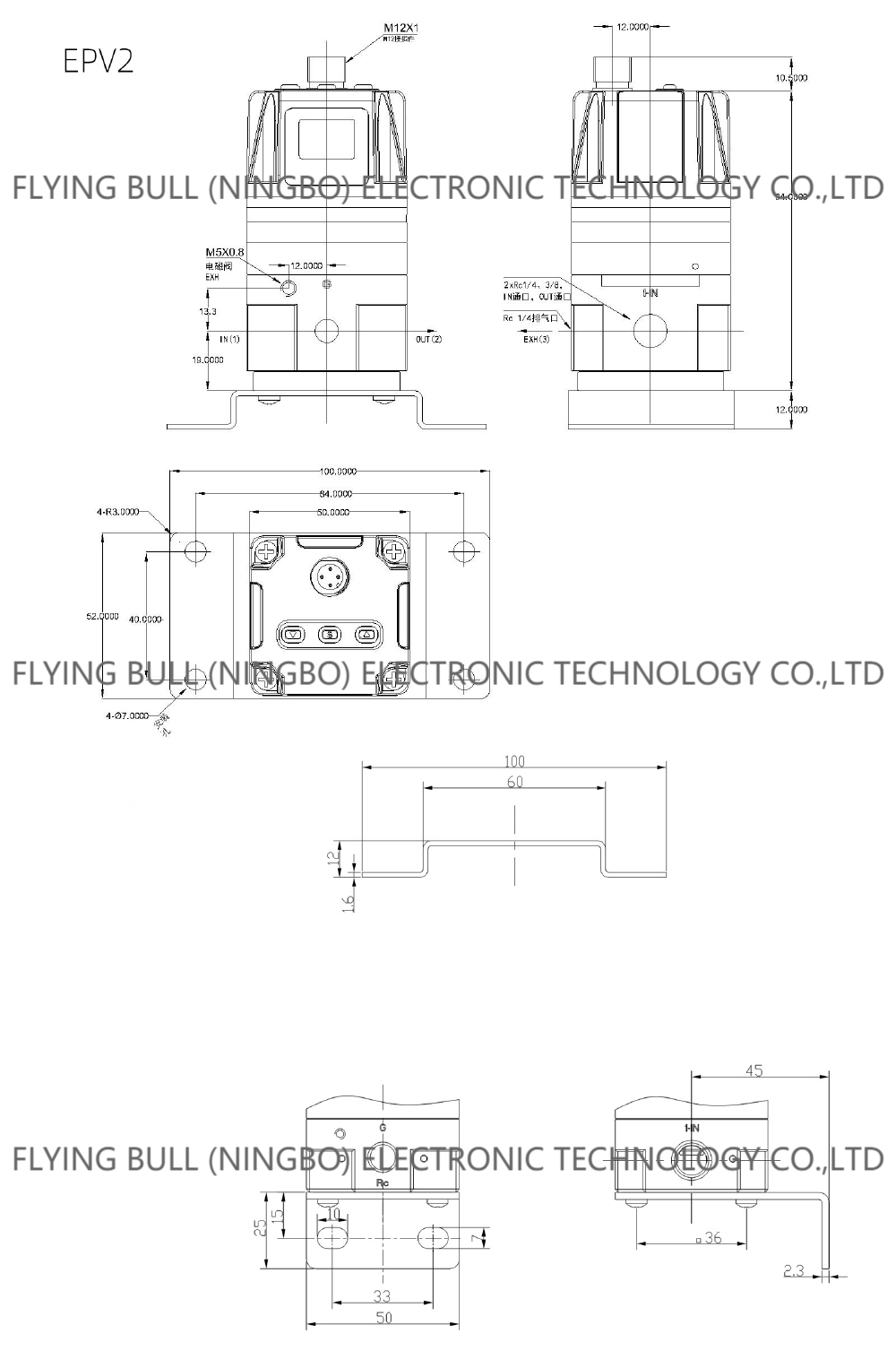
Рақами модел: Epv2-1 Epv2---3 epv2-5
Ҷадвали фишорро таъин кунед: 0.005 ~ 0.5mpa
Навъи ҷории вуруд: DC4 ~ 20ма, DC0 ~ 20ма
Навъи шиддати суди суйа: dc0-5v, dc0-10v
Натиҷаи фурудгоҳи сигнали баромад: NPN, PNP
DC: 24V 10%
DC: 24В камтар аз 1.2a
Навъи ҷорӣ навъи ҷорӣ: 250ω камтар аз
Навъи шиддати муқовимати муқовимат: тақрибан6.5kω
Вуруди пешакӣ: DC24VTTPE: тақрибан4.7K
Натиҷаи аналогӣ: "DC1-5V (бесамар: 1 Кадгор)
DC4-20ma (нагардидани сарборӣ: 250 ккир назар
Дурустии баромад дар давоми 6% (FS) "
хатӣ: 1% FS
Sluggish: 0,5% fs
Такроран: 0.5% fs
Хусусияти ҳарорат: 2% FS
Дурустии фишори фишор: 2% FS
Натиҷаи фишор Нишондиҳандаи фишор: 1000гумонӣ
Ҳарорати атроф: 0-50 ℃
Соҳаҳои муҳофизат: IP65
Қобилияти таъминот
Фурӯши воҳидҳо: ашёи ягона
Андозаи бастаи ягона: 7x4x5 см
Вазни махсуси умумӣ: 0.300 кг
Муқаддима
Калонани мутаносиби энергетикӣ он аст, ки назорати назорати ифшои ҷараёни назорати электронӣ мебошад. Дастгоҳи танзимкунандаи фишори барқии назорати барқ аз як гузариши ҳавои ҳавоӣ ва дастгоҳ иборат аст, ки клавиатураи солиноид, санҷиши демократи фишор ва гардиши фишор. Вақте ки сигнали вурудӣ кушода аст, як ҷазаи пешакии солиноид пӯшида мешавад, бунёдии гармидиҳӣ ба Пилгари пилотӣ ҳаво медиҳад ва асъори асосӣ барои фишори миёна ҳаракат мекунад.
Таҳрири принсипи сохторӣ
Вақте ки сигнали вуруд зиёд мешавад, клапти озмоишӣ 1 аз бандари сарфакорона ба Палатаи пилотӣ 5, ва фишори ҳаво дар қисми болоии ҳавопаймо 5, то ки ҷолиби ҳавопаймо 4 пайваст карда шавад Диафрагм 2 кушода шудааст ва мири зараҳии 3-и ихроҷ пӯшида аст, дар натиҷа фишори баромад. Ин фишори баромад ба ноҳияи фишор оварда мешавад 8. Ин ҷо, фишори натиҷа то он даме ки ба сигнали вуруд табдил дода шавад, то ки фишори натиҷа таносуби сигнали вурудро тағйир диҳад. Зеро як механизми Backle Backle вуҷуд надорад, клавиатураи номувофиқ ҳассос аст ва эътимоднокии баланд дорад.
Вақте ки сигнали вуруд зиёд мешавад, клапти озмоишӣ 1 аз бандари сарфакорона ба Палатаи пилотӣ 5, ва фишори ҳаво дар қисми болоии ҳавопаймо 5, то ки ҷолиби ҳавопаймо 4 пайваст карда шавад Диафрагм 2 кушода шудааст ва мири зараҳии 3-и ихроҷ пӯшида аст, дар натиҷа фишори баромад. Ин фишори баромад ба ноҳияи фишор оварда мешавад 8. Ин ҷо, фишори натиҷа то он даме ки ба сигнали вуруд табдил дода шавад, то ки фишори натиҷа таносуби сигнали вурудро тағйир диҳад. Зеро як механизми ботлоқи нест нест, клазин барои ифлосшавӣ ҳассос аст ва эътимоднокии баланд дорад.
Расми маҳсулот
Тафсилоти ширкат







Бартарии ширкат
Боркашонӣ

Саволҳои зиёд такрормешуда






